Visualization Setup
The visualization is intended to test the robot behavior without the actual robot.
For using the PC visualization a joypad is required. Right now only an XBOX One joypad has been programmed. Other input device will be implemented as requests arise and hardware for testing is available.
Install ROS
Install the full Desktop version of ROS2 Foxy.
Install Colcon, which is used to build the project and Xacro, which is used for model building.
sudo apt install python3-colcon-common-extensions
sudo apt install ros-foxy-xacro
Note: You may need to install further packages, if they are not yet present on your system. Carefully read the console output to install missing packages.
Download and build
Clone the Repo:
git clone --recurse-submodules https://gitlab.com/Combinatrix/project-leptan.git
Navigate into the project directory and build the project:
cd project-leptan
colcon build
Or build the project and run the tests:
colcon build && colcon test && colcon test-result --verbose
Usage
Source ROS2 as described in the installation package. Then source the generated files.
source /opt/ros/foxy/setup.bash
source install/setup.bash
Connect the joypad.
Launch the visualization:
ros2 launch launch_files hexapod_launch.py
The launch file checks if it is run on a Raspberry or not. According to this either the robot or the visualization is started.
Control
As of time of writing the controls are (Button guide):
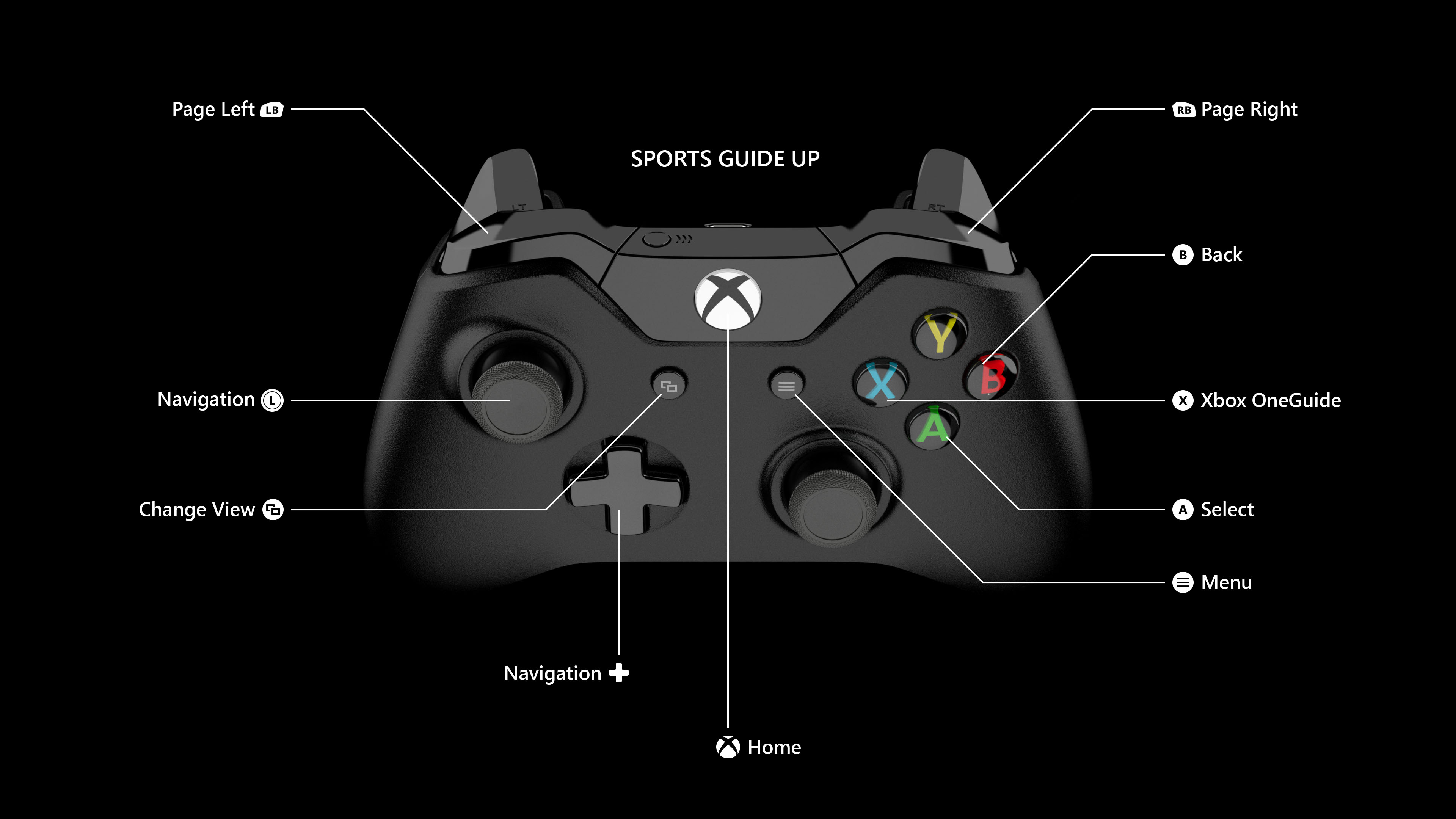{kind=link}
Menu Turn on, go to neutral position
A Stand up
B Sit down
X Switch between walking mode and body rotation mode
Joy Stick Left Walk
Joy Stick Right Turn/Rotate